3D MAPPING DRONE
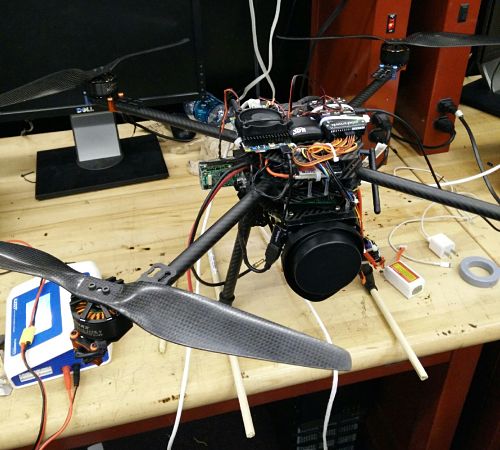
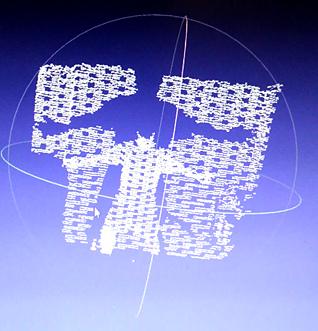
The objective of this project was to create an unmanned aerial vehicle that has the capability to scan a location and collect location points via a Kinect camera. The collected data will be used to make a 3D map of the scanned area. The design of the drone will support the ability of becoming autonomous, but initially will only be manually controlled. In addition to the Kinect, this drone will use a LIDAR in order to detect objects and avoid them with preloaded algorithms in the flight controller. The main computing unit, an embedded Linux device, will have two way communication with the flight controller to assist in automation as well as location detection in an environment. For easier charging of the battery, the base of the drone will have an induction charging system.
We would like to give a special shout out to our sponsor, Polyglass USA!