AUTONOMOUS SENTRY ROBOT
SUMMARY
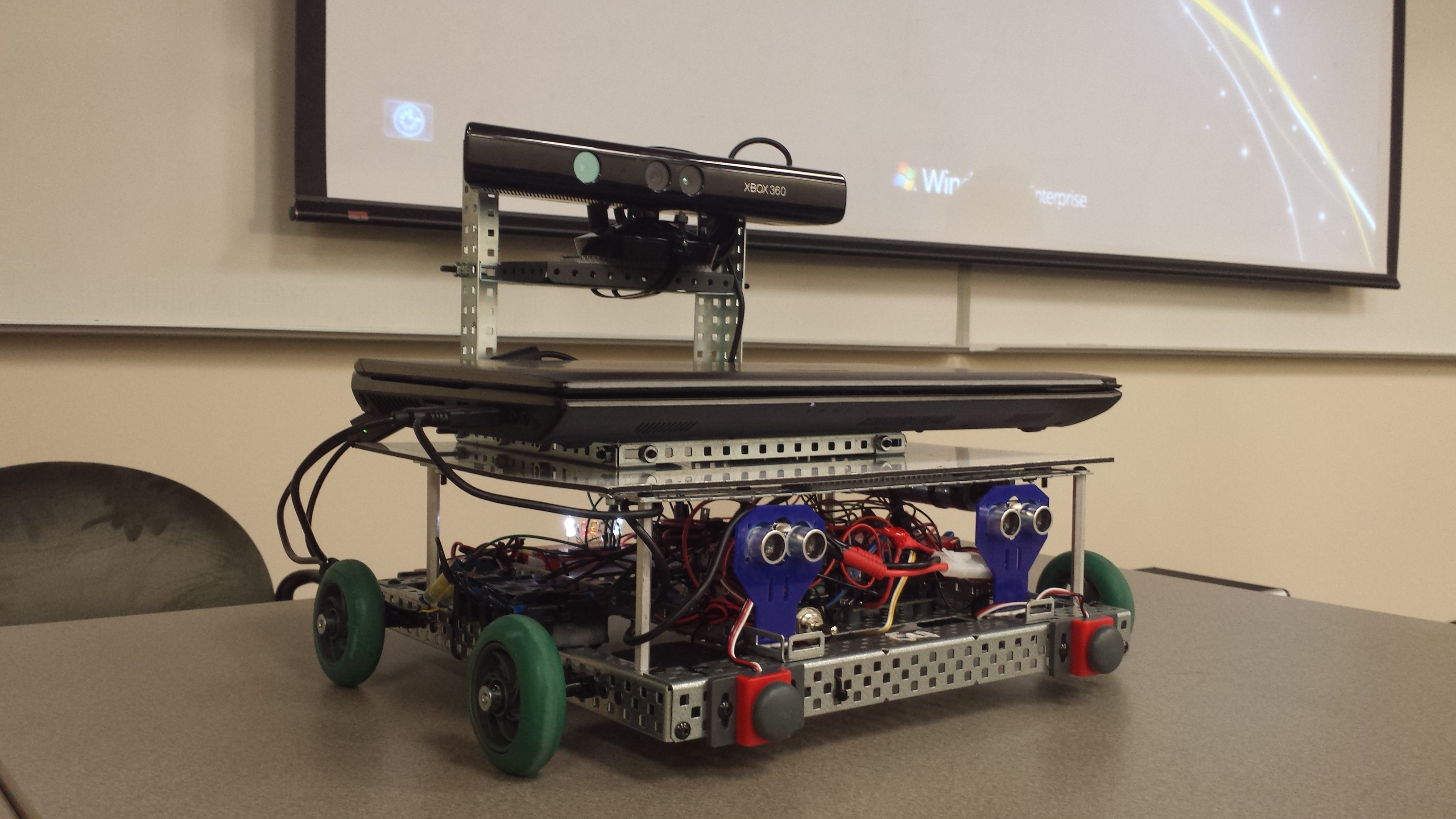
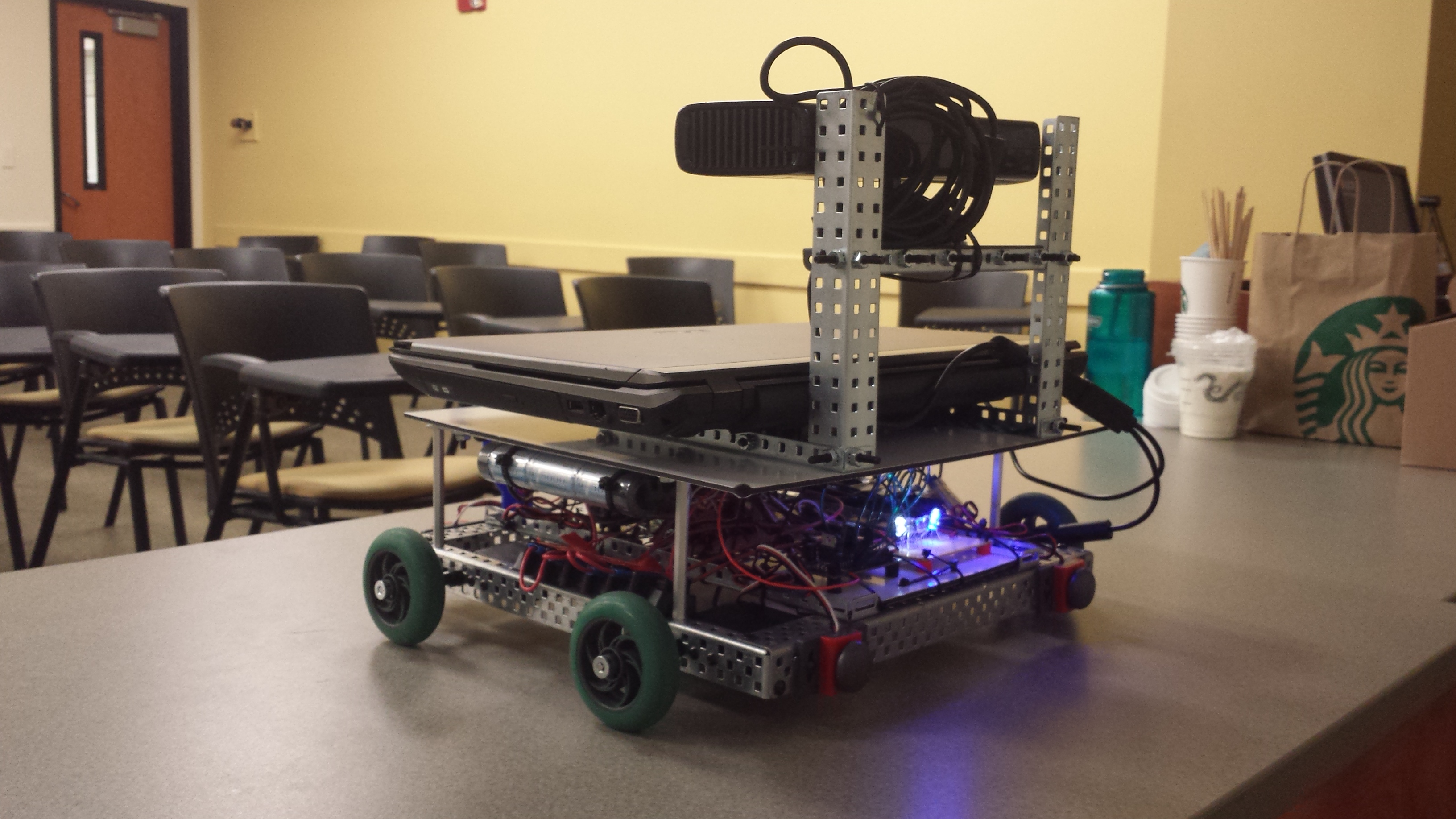
The Autonomous Sentry Robot is an automated home surveillance system with mapping and motion detection capabilities, powered by ROS and OpenCV. The ASR utilizes a Kinect for it's depth sensor and webcam, two ultra sonic sensors and four tactile sensors for it's reactive navigation system, and a laptop which acts as a server. The repository is available here.
FEATURES
Motion Detection:
The ASR has a robust motion detection algorithm powered by OpenCV. As the ASR operates autonomously,
it will periodically stop and orient itself towards the greatest distance it can detect. It will then
detect motion for a specified time interval.
Alert Reporting:
If the ASR detects motion, or the user captures an image while operating the ASR manually, the image
will be saved locally and sent to the user's GMail account. Images are sent with a time stamp and
edited with a target over the area that motion was detected.
Mapping and Localization:
The ASR has the ability to map and localize itself within its surroundings as it operates manually or
autonomously. We utilize a SLAM algorithm called
HectorSLAM
developed by Stefan Kohlbrecher and Johannes Meyer.
Autonomous Navigation:
The ASR's autonomous navigation algorithm is powered by a reactive system of ultrasonic sensors and
tactile sensors. The ASR will wander until certain range thresholds are crossed and dynamically
determine a new bearing or orientation.
Manual Navigation:
The ASR uses a simple control scheme and user interface for manual navigation. While the user
navigates, they can see from the robot's perspective via its webcam video stream.
TEAM:
Brian Dodge - Electrical Engineer
Nick Musco - Electrical Engineer
Trevor Roman - Computer Engineer
SPONSORS:
